Caractéristiques techniques :
(1) Avantage en matière d'efficacité structurelle
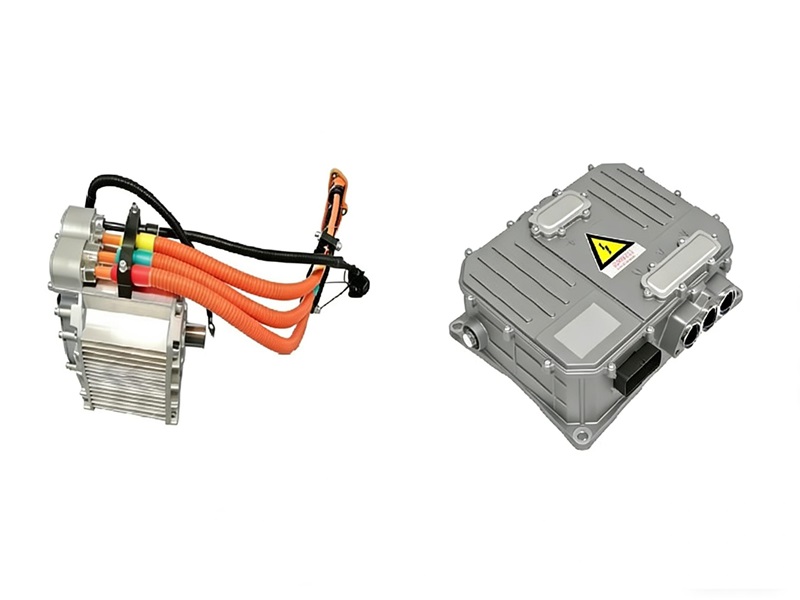
L'utilisation d'un moteur synchrone à aimant permanent et à fil plat, comparée à celle d'un moteur traditionnel à fil rond, permet d'augmenter le taux d'occupation des encoches grâce à l'enroulement à fil plat, améliorant ainsi le rendement du moteur et sa capacité de production continue.
(2) Performances et densité de puissance
Configuration d'alimentation flexible
Densité de puissance élevée
(3) Fiabilité et adaptabilité
L'indice de protection IP67, avec d'excellentes performances en matière d'étanchéité à la poussière et à l'eau, permet de s'adapter à des conditions de travail complexes.
L'utilisation d'un encodeur ABZ permet de contrôler précisément la vitesse et la position du moteur, garantissant ainsi la précision de la puissance de sortie.
(4) Caractéristiques fonctionnelles
Le système de commande électronique prend en charge les fonctions VCU, le diagnostic UDS et la mise à jour à distance OTA. Les utilisateurs peuvent sélectionner le mode couple/vitesse et l'enregistrement des événements en temps réel. Le système offre des fonctions de protection complètes, notamment la protection contre les défauts, la sécurité et l'amortissement actif.Compatible avec la communication CAN, et doté de fonctions de sécurité intégrées.
| Numéro de série | Projet | Décrire | Remarque |
| 1 | Type de moteur | Moteur synchrone à aimant permanent | fil plat |
| 2 | Plage de tension de fonctionnement | 60-108 Vcc | / |
| 3 | Tension nominale | 96 Vcc | / |
| 4 | méthode de refroidissement | Refroidissement naturel par l'air | Nécessite un assemblage au vent |
| 5 | Puissance nominale/de crête | 6 kW/12 kW ou 7,5 kW/15 kW | Compatible 10 kW/23 kW |
| 6 | Couple nominal/maximum | 18 Nm/65 Nm | Compatible 28 Nm/95 Nm |
| 7 | vitesse nominale/de pointe | 3500/7500 tr/min | / |
| 8 | Type d'encodeur | Z ABEncodeur | / |
| 9 | Amplitude de la force électromotrice inverse | 19 V à 1000 tr/min | / |
| 10 | Taille du moteur | 195*230*237 mm | / |
| 11 | Fonction VCU | Mode de conduite et logique de calcul de la vitesse du véhicule, etc. | Soutien |
| 12 | Fonction de protection | Protection contre les défauts, protection de sécurité, amortissement actif, etc. | Soutien |
| 13 | Méthode de diagnostic | Diagnostic UDS | Soutien |
| 14 | Méthode de mise à niveau | Mise à niveau à distance OTA | Soutien |
| 15 | Méthode de réveil | mode de réveil et de veille câblé | / |
| 16 | Niveau de protection | IP67 | / |
| 17 | Méthodes de communication de contrôle | CAN2.0 | / |
| 18 | Alimentation de contrôle basse pression du système | 12V | / |
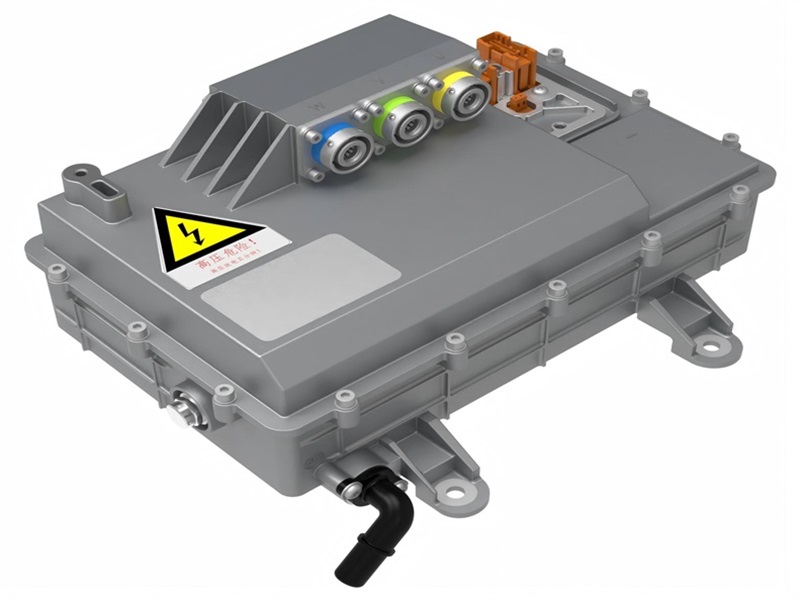
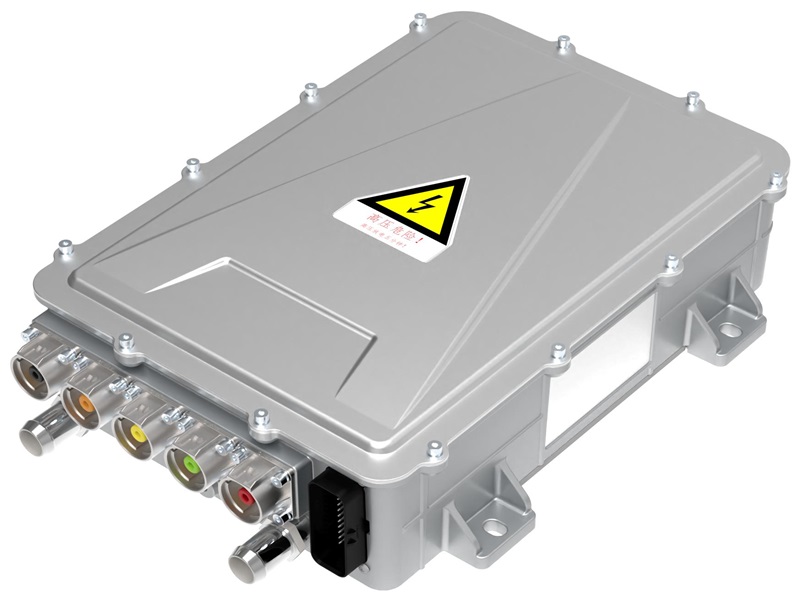
| 19 | taille du contrôleur de moteur | 235,6 * 245,5 * 133 mm | / |
Spécifications d'interface
Diagramme d'apparence de l'interface


Schéma d'interface du connecteur haute tension


Schéma d'interface du connecteur basse tension 

Scénarios et équipements applicables
(1) Microvoitures
(2) Tricycles
(2) Engins de chantier
Questions et réponses
Q : Quelles certifications possédez-vous ?
A: Nous possédons les certifications IATF 16949 et CE.
Q : Quelle est votre quantité minimale de commande ?
R : Nous acceptons généralement les commandes de conteneurs complets. La quantité exacte peut être déterminée en fonction de la solution d'emballage des différents produits.
Q : Dans quel délai puis-je obtenir un devis ?
A: Produits standard : devis fourni le jour même ; Produits personnalisés non standard : sous 7 jours ouvrables.
Q : Combien de temps faut-il pour obtenir un échantillon ?
R: Environ 30 jours pour les produits standard et environ 75 jours pour les produits personnalisés non standard.
Q : Avez-vous des produits en stock ?
R: Oui, nous avons du stock disponible.
Pourquoi choisir WISE ?
Conception interne de l'algorithme et du matériel
Droits de propriété intellectuelle complets pour la conception de la commande moteur et de l'étage de puissance, permettant une personnalisation rapide et des performances stables.
Capacité de personnalisation flexible
Puissance, couple, dimensions mécaniques, interface de montage, matrice CAN et logique de contrôle personnalisables.
Chaîne d'approvisionnement fiable et capacité de production de masse
Une chaîne d'approvisionnement en amont stable et des lignes de production automatisées garantissent une qualité constante et des livraisons dans les délais.













 CATÉGORIES DE PRODUITS
CATÉGORIES DE PRODUITS